
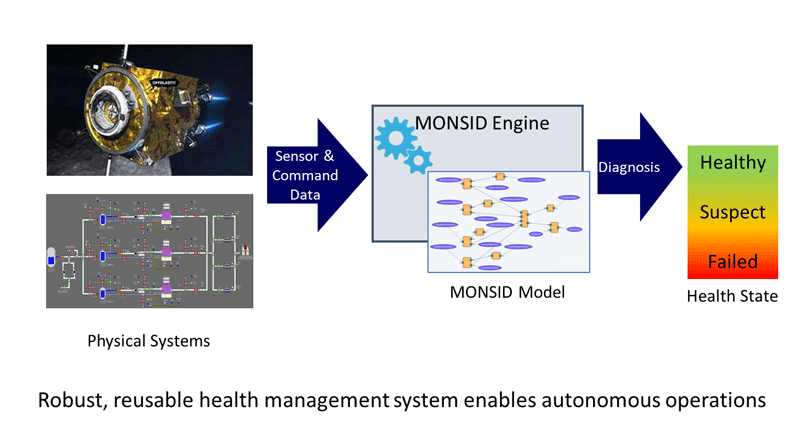
MONSID Projects and Applications
MONSID® has been extensively tested, verified, and validated, including performance analysis.
More importantly, MONSID has been actively used over a wide variety of cyber-physical systems.
Read about Okean Solutions' projects at okean.solutions...
JPL Athena Test Rover
MONSID uncovered surprise behaviors, unanticipated interactions between controller and planner, real faults, terrain-induced stalls, motor stalls, hidden/masked faults that would have fooled a traditional monitor.
Okean Solutions supported the three-year JPL Self Reliant Rover strategic initiative to develop and demonstrate autonomy-enabling technologies for Mars rovers. MONSID models of a rover power and mobility subsystems were created and tested with Mars Science Lab telemetry data as well as on the Athena test rover operating in JPL’s Mars Yard. MONSID was able to detect and identify seeded hardware faults as well as expose actual, in-situ software and operational errors. This effort marked the first time that MONSID was successfully tested with real hardware data.
Papers

Caltech State-of-the-Art Test Facility
Here's a video the CAST team posted of a recent demo where MONSID was utilized to help them determine when a problem was encountered. MONSID software is showcased in the top 2 charts.
For this demo, the satellite was supposed to adjust orientation around the asteroid (the spud-looking thing on the wall) using its reaction wheels. About 20 seconds into the demo, one of the wheels failed. MONSID detected the failure (the blue line spikes in the top chart) and the information was used by the planner (provided by JPL) to effectively update the plans (and hence switch to other controlling hardware) to allow completion of the originally desired task.
Technology Development
CubeSats
- Developed power subsystem and ACS models for I&T tool (Lunar Flashlight)
- Integrated with FSW (NASA’s F Prime) and tested with ACS flight data (ASTERIA)
- Demonstrated on ground-based testbed with injected faults (ASTERIA)
Papers
Autonomy Strategic Technology Development (JPL)
- Target system for Model-Based System Assurance techniques
- Part of JPL’s FRESCO autonomy framework
- Integrated with MEXEC Planner & Scheduler for system level autonomy
Papers
Caltech Aerospace Robotics and Control Lab
- MONSID implemented on reaction wheel and thruster 6-DOF platforms using ROS
- Identified injected reaction wheel failures
- Demonstrated onboard fault identification for targeted response
Video
SBIR Phase II 2021 Model-Based Architecture for Responsive Spacecraft Autonomy
June 26, 2021
Okean Solutions culminated a 2-year SBIR Phase II project with the Air Force Research Laboratory for a high-fidelity prototype demonstration of a system that clearly shows how the MONSID® model-based fault management system can be used effectively on Space Superiority missions.
Okean Solutions was awarded the Phase II contract, following a successful Phase I contract, under Topic AF131-092 On-Board Autonomy for Decreased Satellite Response Time.
This topic seeks to develop and demonstrate technologies for embedded satellite autonomy and cited model-based and constraint-based detection systems as examples of the types of technologies that were of interest. The goal is to improve the capability of space assets to respond to real-time events, including faults.
Since MONSID is a model-based system designed for on-board use and is dual-use with commercial applications, it directly supports Air Force needs and is also aligned with stated Air Force and DoD goals to increase adoption of dual-use technologies.
We infused our MONSID system with Air Force Research Laboratory’s (AFRL’s) test and demonstration environment for a progressive, scalable architecture for evaluating onboard spacecraft autonomy.
The testbed is a 3 degree-of-freedom platform with spacecraft attitude control hardware and processors. During this effort we developed diagnostic models of testbed hardware, integrated MONSID with the testbed processors using NASA’s Core Flight System (cFS) framework, and evaluated system performance via a test campaign.
Read about our approach, objectives, and accomplishments in the full article...
NASA SBIR Phase I 2020 Project: Model-based Fault Diagnosis for Autonomous Propellant Management
March 1, 2021
This was a 6-month SBIR Phase I project with Kennedy Space Center that included early technical development to determine the feasibility of the innovation.
The topic covers Autonomous Operations Technologies (AOT) that support activities performed by rocket engine test facilities, propellant servicing systems, processing and launch of vehicles and payloads, and for extended surface operations on the Moon and Mars. AOT performs functions such as systems and components’ fault prediction and diagnostics, anomaly detection, fault detection and isolation, and enables various levels of autonomous control and recovery from faults, where recovery may include system repair and/or reconfiguration.
We proposed our MONSID technology in support of Autonomous Propellant Management (APM). MONSID supports autonomous operations technology requirements to reduce operations and maintenance costs and minimizes human in the loop intervention. Applied to propellant management and test facilities, the MONSID technology can provide a critical component for autonomous health management of these systems.
Read about our approach, objectives, and accomplishments in the full article...
Projects Related to MONSID Product Development
MONSID was initially developed under a 2015 NASA Phase I project and a 2016 NASA Phase II SBIR project. In support of MONSID model design and analysis we created a host of tools including MONSID Toolkit, which was developed under a 2018 NASA Phase 2x project.
Read more about these MONSID projects by following the links below.
- Model-Based Off-Nominal State Isolation and Detection System for Autonomous Fault Management, Phase I

- Model-Based Off-Nominal State Isolation and Detection System for Autonomous Fault Management, Phase II
- Model-Based Off-Nominal State Isolation and Detection System for Autonomous Fault Management, Phase 2X